
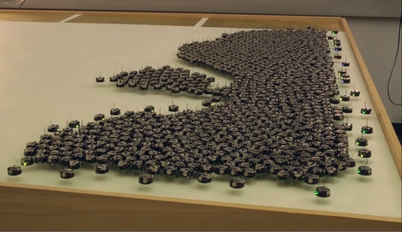
Det ser ikke betryggende ut. Over tusen roboter svermer av gårde, og de har en plan.
En enkelt robot er ikke større enn en saltbøsse, men hvis du setter tusen stykker i sving får du plutselig en robotsverm. Forskerne ved Harvard har klart å få dem til å oppføre seg på en koordinert måte i stor skala.
- Les også: Disse robotene bygger uten byggeleder
Robotene kalles Kilobots, og er bygget av forskere på Harvard. Robotene har vært brukt i flere år for å undersøke hvordan små roboter kan samarbeide, men dette er første gang så mange roboter har jobbet sammen mot et felles mål.
Pusler med sitt
Ifølge forskerne bak robotene, har det knappest vært noen robotsvermer som er større enn 100 enkeltroboter.
Det er vanskelig å koordinere så mange roboter på en gang, samtidig som det er kostbart og tidkrevende å produsere så mange enkeltroboter.
Hver enkelt robot er veldig enkel, og dermed billig, og fungerer nesten som en enkelt celle i et biologisk system.
- Les også: Derfor er roboter og klovner så skumle
Den består bare av tre bein med vibrerende motorer som gir framdrift, og infrarøde sendere og mottakere som lar den kommunisere med andre roboter og en hoveddatamaskin styrt av et menneske.
Algoritmen som styrer robotene lar dem organisere seg på en enkel måte, og når beskjeden om et mønster først er gitt, kan kilobotene styre resten på egenhånd, uten at de trenger detaljstyring eller flere beskjeder underveis.
Det starter med fire roboter som blir plassert ut av et menneske, og lager grunnlaget i et koordinatsystem.
Alle de andre robotene får tilsendt et todimensjonalt bilde av mønsteret de skal lage. Så begynner de å organisere seg i forhold til de fire koordinerende robotene.
Robotene følger kanten av gruppen, mens de har oversikt over avstanden fra utgangspunktet og deres egen, relative avstand til andre roboter.
Deretter går robotene etter tur til et punkt som roboten synes passer i forhold til det store bildet.
Bildene fra videoen over blir spilt av i svært høy hastighet, og det ser ut som om tusenrobotgjengen bruker mellom 5 og 12 timer på å tegne en figur.
Trafikkork
Robotene retter også sine egne feil. Hvis en robot stopper opp eller surrer rundt, merker de andre robotene den avvikende oppførselen og prøver å rette opp feilen.
Siden kilobotene er så enkle, har de også noen begrensinger, som at de ikke er spesielt gode på å gå framover i en rett linje. Dette er også begrensinger algoritmen må ta høyde for.
Forskerne bak eksperimentet tror vi kommer til å se flere og flere robotsvermer i framtiden, og arbeidet med algoritmen som styrer robotene kan bidra til kunnskap rundt kollektive kunstige intelligenser.
- Les også: Verdens minste flygende robot
Problemet er at man må være sikker på at robotene kan utføre instruksjoner, selv om noe skulle gå galt underveis eller robotene møter sine egne begrensninger.
– Vi kommer nok snart til å se store antall roboter som jobber sammen, enten det er hundrevis av roboter som rydder opp etter miljøkatastrofer, eller millioner av selvkjørende biler som må samarbeide på veiene, sier Radhika Nagpal ved Harvard i en pressemelding, som leder laboratoriet hvor forsøkene fant sted.
Designet og styringsystemene bak Kilobotene er sluppet med Creative Commons-lisens, så hvis du som leser dette har lyst til å bygge noen selv, kan oppskriften finnes her.
Referanse:
R. Nagpal m.fl.:Programmable self-assembly in a thousand-robot swarm, DOI: 10.1126/science.1254295, Science
Leave a Reply