
Arkeologer er interessert i skipsvrak, ingeniører er opptatt av offshore overvåking og kartlegging, og biologer vil studere dyr og planter.
Til dette bruker forskerne intelligente undervannsroboter og et nytt hyperspektralt undervannskamera.
Et høyspektralt kamera har flere tusen «farger» til rådighet, også de som er usynlige for det menneskelige øye.
Målet med stadig mer avansert teknologi og metoder, er at robotene selv skal forstå, planlegge og utføre avansert arbeid under de ekstreme forholdene på havbunnen.
Verdens største laboratorium
– Those robots are fancy! utbryter Mauro Candeloro entusiastisk.
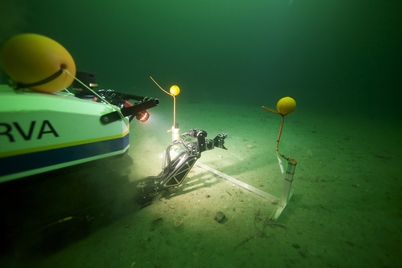
Candeloro forsker på undervannsroboter sammen med Fredrik Dukan. Robotene kalles ROV, «Remotely Operated Vehicle», som betyr fjernstyrte fartøy.
– Interessen for havbunnen er stor, men leie av skip, personell og materiell for ekspedisjoner på havet er kostbart. Det er komplisert å undersøke spesielle og vanskelige miljøer på havbunnen, sier Candeloro.
AUR-Lab er et senter for anvendt forskning innenfor undervannsrobotikk med verdens største laboratorium: Trondheimsfjorden.
Marin utforskning, kartlegging og overvåking er de viktigste oppgavene AUR-Lab bruker ROV til.
Candeloro er stipendiat ved Institutt for marin teknikk og AMOS, Senter for autonome marine systemer på NTNU. Fredrik Dukan er stipendiat ved Institutt for teknisk kybernetikk. Disse fagmiljøene jobber sammen med andre fagmiljøer ved AUR-Lab.

Dynamisk posisjonering
Siden forskerne ikke selv kan oppleve hvordan det er på havbunnen, trenger de en smart måte å kontrollere ROV på.
Oppdraget i dypet avhenger av at ROV holdes stødig og manøvreres så presist som mulig. Det er svært viktig at ROV går stabilt, og dette er det vanskeligste.
Undervannsroboten bruker ikke anker, men er utstyrt med flere propeller som sørger for å holde fartøyet i stødig posisjon.
ROV må være nær bunnen for å kartlegge, men ikke for nær fordi forskerne vil ha kartlagt så mye som mulig på en gang.
Er ROV for høyt over bunnen går det ut over lysforholdene. To til tre meter over bunnen er passe.
Krefter i dypet
Når undervannsroboten beveger seg, beregner og kompenserer den for strømmer i vannet, gravitasjon og oppdrift.
– Summen av gravitasjon som presser ROV ned og oppdriften som dytter ROV opp, blir en positiv kraft som dytter ROV opp. Vi sier at ROV har positiv oppdrift, sier Candeloro.
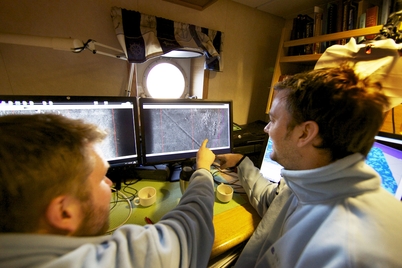
Operatøren på båten kan gripe inn og styre med joystick. Men operatøren følger mest med på operasjonspanelet som viser alle sensorene på ROV.
Alt som skjer med ROV under oppdraget logges slik at forskerne kan analysere etterpå.
Presis manøvrering
Andre utfordringer er for eksempel håndtering av feil, sikkerhet, hindringer i dypet og energi.
Propeller og sensorer gjør at ROV kan manøvreres forover og bakover, ned og opp, sidelengs, rotere, holdes i vater, holdes i posisjon, gi retning, dybde og fart, samt akselerere. Farten er normalt 0,3 meter i sekundet.
Programmet måler alt som skjer med ROV og i omgivelsene. Dermed kan propellbevegelser kalkuleres før de faktisk skjer, og propellene styres slik at de kompenserer for endringer som inntreffer.
Hyperspektralt kamera
Kameraer brukes for å identifisere, kartlegge og overvåke habitater, koraller og svamper, mineraler samt inspisere rør og annet på havbunnen.
AUR-Lab og Ecotone, et spin-off selskap fra NTNU, samarbeider nå om å utvikle et nytt hyperspektralt undervannskamera. Teknikken er basert på optiske fingeravtrykk. Kameraet er følsomt for flere bølgelengder enn rød, grønn og blå.
– Databaser med optiske fingeravtrykk er svært nyttig. Det kan vi bruke for å gjenkjenne objekter vi er spesielt interessert i på havbunnen, sier Candeloro.
– Det hyperspektrale undervannskameraet har allerede kartlagt deler av Barentshavet med den nye teknikken. Kameraet er et stort skritt på veien videre for å forstå marin biologi og et effektivt verktøy for å inspisere undersjøiske rørledninger, utdyper han.

Grønn verden
Et vanlig undervannskamera har sensorer som kun er følsomme for rødt, grønt og blått. Og under vann kan kameraet ta bilder av et begrenset område.
Vann absorberer lys, det vil si energi. Naturlig lys går ned til omtrent 20 meter, og deretter blir det mørkere og mørkere. Dette avhenger noe av vannkvaliteten. ROV må uansett være nær bunnen for å ta bilder.
– Bilder som tas med vanlige undervannskameraer blir grønnlige. Det er fordi grønt reflekteres i vannet og slik blir fanget opp av kameraet. Vi kan til en viss grad rekonstruere fargene i bildene igjen, sier Candeloro.
Røde og blå bølgelengder blir for det meste absorbert av vannet.
Går frem og tilbake
På båten ser forskerne det ROV ser gjennom kameraene. ROV har flere kameraer og lyskastere.
– ROV går frem og tilbake på et definert område og tar bilder til området er ferdig fotografert. Området kan være et større areal eller et skipsvrak. Kameraet dekker en fire til fem meters «gate», forklarer Candeloro.
Hvert bilde som tas har nøyaktig posisjon. Mange av bildene vil overlappe hverandre delvis eller flyte over i hverandre.
3D-kart
Et program analyserer bildene og gjenkjenner objekter, for eksempel en sjøstjerne.
Hvis sjøstjerna er på to bilder, vil programmet tilpasse og overlappe bildene for å gjengi motivet så godt som mulig. Til slutt setter kartprogrammer alle bildene sammen til flere typer 3D-kart.
– Bildene har noe ulik vinkel fordi ROV bikker litt på seg på havbunnen. Programmet kompenserer for dette og gjør kartet så bra som mulig, sier Candeloro.
– Men lite lys og den effekten sjøvann har på fargene er et problem
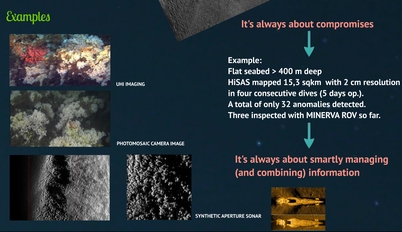
Mange typer teknologi kan brukes for å avdekke havbunnen: flere former for avbildning, flere måter å måle akustikk på og fjernkontroll fra båten.
Alt handler om smart styring og å integrere mye informasjon for å få kartlagt havbunnen.
Fremtidens marine leting
– I fremtidens marine leting vil funksjonene i ROV integreres og automatiseres enda mer. ROV vil også ta over mer av planlegging og beslutning selv, sier Candeloro.
Nøkkelordet er autonome operasjoner. Dataene skal analyseres i sanntid slik at roboten, ROV, forstår hva som er rundt den og hva som er best å gjøre for å utføre oppdraget.
– Vår ROV er et perfekt verktøy og laboratoriene perfekte forskningsmiljøer for å utvikle denne teknologien, avslutter Mauro Candeloro.
Leave a Reply